
DCS50-FL (täitematerjal: pulber)






DCS50-FL (täitematerjal: pulber)
Sissejuhatus
DCS50-FL koosneb peamiselt täiteainest, raamist, kaaluplatvormist, rippkoti seadmest, koti kinnitusseadmest, tõsteplatvormist, konveierist, elektrilisest juhtimissüsteemist, pneumaatilisest juhtimissüsteemist jne. Kui pakkesüsteem töötab, tuleb lisaks koti käsitsi asetamisele. , pakkimisprotsess viiakse automaatselt lõpule PLC-programmi juhtimisega ning koti kinnitamise, tühjendamise, mõõtmise, lahtise koti, transportimise jne protseduurid viiakse kordamööda lõpule;Pakendisüsteemil on täpse loendamise, lihtsa kasutamise, madala mürataseme, vähem tolmu, kompaktse struktuuri, mugava paigalduse, ohutuse ja töökindluse ning töökohtade vahelise turvalise blokeerimise omadused.
Omadused
| Omadused | ||
| Täiteaine | Kruvi täiteaine | |
| Count | Rippumisena arvestamine | |
| Kontrollsüsteem | Sellised funktsioonid nagu automaatne kukkumise korrigeerimine, tõrkealarm ja rikete enesediagnostika, varustatud sideliidesega, hõlpsasti ühendatav, võrguga ühendatavad, võivad olla pakkimisprotsessis alati jälgitavad ja võrgustatud haldus. | |
| Materjali ulatus: pulbrid, granuleeritud materjalid. | ||
| Kasutusala: keemia, farmaatsia, sööt, väetis, mineraalpulber, elektrienergia, kivisüsi, metallurgia, tsement, biotehnoloogia jne. | ||
| Parameeter | ||
| Mahutavus | 160-300 kotti/h | |
| Täpsus | ≤±0,2% | |
| Suurus | 5-50kg/kott | |
| Jõuallikas | Kohandatud | |
| Surveõhk | 0,6-0,8 MPa.5-10 m3/h | |
| Puhub rott | 500 -2000m3/h | |
| Keskkond: Temp -10℃-50℃.Niiskus <80% | ||
| Aksessuaarid | ||
| Asetage kott | 1. Manuaal 3. Automaatne | |
| Kaitse | 1. Plahvatuskindel 2. Ei ole plahvatuskindel | |
| Tolmu eemaldamine | 1. Tolmu eemaldamine 2. Ei | |
| Materjal | 1. Teras 2. roostevaba teras | |
| Kaubaalustele panemine | Käsitsi kaubaalustele asetamine, kõrge-madal kaubaalustele asetamine, roboti kaubaalustele asetamine | |
| Õmble | Automaatne 2.Manuaalne | |
Tööprotsess
a, kottidesse pakkimine, kotipressi silindri presskott, koti täitumine turvapadja täitumine
d, laadimise lõpus tõstetakse kotipressi silinder, et eemaldada pakend kott

b, kiire söötmisprotsess
c, aeglane söötmisprotsess
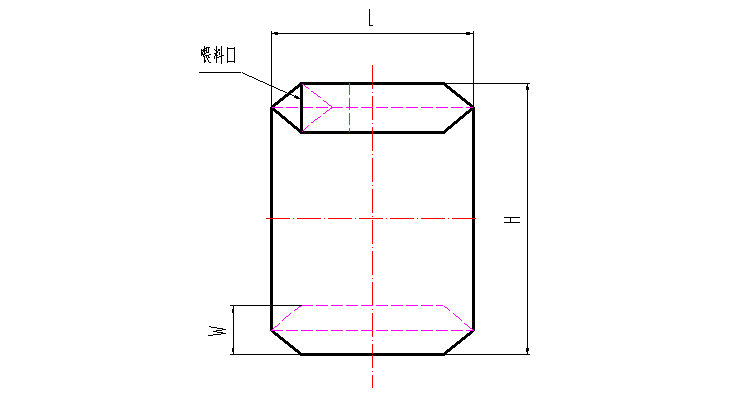
Pakendikott on klapitasku kujul.
Kasutajad peavad valima erinevate spetsifikatsioonidega pakendikotid vastavalt erinevale pakendi kaalule ja erinevatele materjalide puistetihedusele.Ei ole lubatud oma äranägemise järgi valida liiga suuri ega liiga väikeseid pakendikotte.
Pakendikoti piirjoon on järgmine.
Vastuvõttev asutus
Kui pakkimismasin töötab, pange esmalt pakendekott söötmisotsikule, lülitage koti kinnituslüliti sisse, kotipressi silindri kolb läheb alla ja pakekott surutakse nailonkorgiga söötmisotsikule ja seejärel toitmine algab.Toiteprotsessi ajal, kui materjali kaal suureneb, nihkub kaalu raam, mistõttu deformeerub ka koormusandur ja see deformatsioon on teatud vahemikus lineaarne.Koormusandur muudab nihkesignaali elektrisignaaliks ja saadetakse kaalule.Kui materjali kaal jõuab teatud väärtuseni, annab kaal signaali ja pakkimisprotsess lülitub automaatselt aeglasele kiirusele.Kui materjali kaal jõuab sihtväärtuseni, kui pakkimisprotsess peatub automaatselt.





